Inferring cosmology power spectrum parameters from 2D fields¶
(by Lucas Makinen and Tom Charnock)
A useful example to consider is the inference of the parameter values controlling the shape of the power spectrum used to generate 2D Gaussian random fields. This is interesting because we can analytically calculate the Fisher information to check our convergence and it has aspects which are very similar to cosmological field analysis. This example is split into two parts, first the analytic comparison when the power spectrum is of the form
and a second part where we use a jax implementation of a cosmology
library (pip install jax-cosmo) to infer cosmological parameters
from 2D Gaussian random fields.
In this example we will also show how inception blocks can be implemented in a stax-like neural model.
Power law example - \(P(k) = Ak^{-B}\)¶
The likelihood for an \(N_{\rm pix}\times N_{\rm pix}\) Gaussian field, \(\boldsymbol{\delta}\), can be explicitly written down for the Fourier transformed data, \(\boldsymbol{\Delta}\) as
Since the Fisher information can be calculated from the expectation value of the second derivative of the score, i.e. the log likelihood
Then we know that analytically the Fisher information must be
where \(\alpha\) and \(\beta\) label the parameters \(A\) and \(B\) in the power spectrum. As each \(k\)-mode is uncoupled for this power law form then the derivatives are
We can set up these functions. Note that for large fields there can be an issue with numerical overflow and as such we will use jax in 64 bit mode.
from jax.config import config
config.update('jax_enable_x64', True)
import imnn
import imnn.lfi
import jax
import jax.numpy as np
import jax_cosmo as jc
import matplotlib.pyplot as plt
import tensorflow_probability
from jax.experimental import optimizers
from jax.experimental import stax
tfp = tensorflow_probability.substrates.jax
rng = jax.random.PRNGKey(0)
First we’ll set up our \(P(k)\)
def P(k, A=1, B=0):
return A * k ** (-B)
And the log likelihood is then
def log_likelihood(k, A, B, Δ, N):
Δ = Δ[1:N // 2, 1:N // 2].flatten()
k = k[1:N // 2, 1:N // 2].flatten()
dlength = len(k)
def fn(_A, _B):
nrm = np.pad(np.ones(dlength - 2) * 2, (1, 1), constant_values=1.)
nrm = jax.ops.index_update(
nrm, np.array([[0],[(dlength - 2)]]), np.array([[1], [1]]))
nrm = 1
powers = P(k, A=_A, B=_B)
C = powers * nrm
invC = 1. / powers
exponent = - 0.5 * np.sum(np.conj(Δ) * invC * Δ)
norm = -0.5 * np.sum(np.log(C)) -0.5 * len(Δ) * np.log(np.pi * 2.)
return (exponent + norm)
return jax.vmap(fn)(A, B)
and the Fisher information matrix is given by
def fisher(θ, k, N):
A, B = θ
k = k[1:N // 2, 1:N // 2].flatten()
Pk = P(k, A, B)
Cinv = np.diag(1. / Pk)
C_A = np.diag(k ** -B)
C_B = np.diag(- Pk * np.log(k))
F_AA = 0.5 * np.trace((C_A @ Cinv @ C_A @ Cinv))
F_AB = 0.5 * np.trace((C_A @ Cinv @ C_B @ Cinv))
F_BA = 0.5 * np.trace((C_B @ Cinv @ C_A @ Cinv))
F_BB = 0.5 * np.trace((C_B @ Cinv @ C_B @ Cinv))
return np.array([[F_AA, F_AB], [F_BA, F_BB]])
Notice that we only take the unique modes to calculate the Fisher information. To actually set up our 2D \(k\)-modes we stack values from \(0\to N_i/2 + 1\) to values from \(-N_i/2+1\to0\) and normalising them by \(2\pi/N_i\) where \(N_i\) is the number of \(k\)-modes in each axis. If we choose that our fields have \(128\times128\) pixels then we can calculate \(k\) as
N = 128
shape = (N, N)
k = np.sqrt(
np.sum(
np.array(
np.meshgrid(
*((np.hstack(
(np.arange(0, _shape // 2 + 1),
np.arange(-_shape // 2 + 1, 0)))
* 2 * np.pi / _shape)**2.
for _shape in shape))),
axis=0))
For a fiducial \(A^\textrm{fid}=1\) and \(B^\textrm{fid}=1/2\) we get a Fisher information matrix equal to
θ_fid = np.array([1., 0.5], dtype=np.float32)
n_params = θ_fid.shape[0]
F = fisher(θ_fid, k, N)
print(f"F = {F}")
print(f"det(F) = {np.linalg.det(F)}")
F = [[ 1984.5 -1545.06379524]
[-1545.06379524 1690.49264978]]
det(F) = 967560.5321330648
2D Gaussian random field simulator in jax¶
To create a 2D Gaussian random field we can follow these steps:
Generate a \((N_\textrm{pix}\times N_\textrm{pix})\) white noise field \(\varphi\) such that \(\langle \varphi_k \varphi_{-k} \rangle' = 1\)
Fourier Transform \(\varphi\) to real space: \(R_{\rm white}({\bf x}) \rightarrow R_{\rm white}({\bf k})\) Note that NumPy’s DFT Fourier convention is:
\[\phi_{ab}^{\bf k} = \sum_{c,d = 0}^{N-1} \exp{(-i x_c k_a - i x_d k_b) \phi^{\bf x}_{cd}}\]\[\phi_{ab}^{\bf x} = \frac{1}{N^2}\sum_{c,d = 0}^{N-1} \exp{(-i x_c k_a - i x_d k_b) \phi^{\bf k}_{cd}}\]Scale white noise \(R_{\rm white}({\bf k})\) by the chosen power spectrum evaluated over a field of \(k\) values:
\[R_P({\bf k}) = P^{1/2}(k) R_{\rm white}({\bf k})\]Here we need to ensure that this array of amplitudes are Hermitian, e.g. \(\phi^{* {\bf k}}_{a(N/2 + b)} = \phi^{{\bf k}}_{a(N/2 - b)}\). This is accomplished by choosing indices \(k_a = k_b = \frac{2\pi}{N} (0, \dots, N/2, -N/2+1, \dots, -1)\) (as above) and then evaluating the square root of the outer product of the meshgrid between the two: \(k = \sqrt{k^2_a + k^2_b}\). We can then evaluate \(P^{1/2}(k)\).
Fourier Transform \(R_{P}({\bf k})\) to real space: \(R_P({\bf x}) = \int d^d \tilde{k} e^{i{\bf k} \cdot {\bf x}} R_p({\bf k})\)
\[R_{ab}^{\bf x} = \frac{1}{N^2}\sum_{c,d = 0}^{N-1} \exp{(-i x_c k_a - i x_d k_b) R^{\bf k}_{cd}}\]
We are going to build a broadcastable jax simultor which takes in a variety of different shaped parameter arrays and vmaps them until a single parameter pair are passed. This is very efficient for performing the ABC for example. We’re also going make our simulator so that it could have additive foregrounds (although we won’t use them in this example) as well as a generator for log normal fields where the \(P(k)\) for the Fourier modes are transformed as
and rescaled by the volume of the simulation before generating the field, and then the field is transformed as
def simulator(rng, θ, simulator_args, foregrounds=None):
def fn(rng, A, B):
dim = len(simulator_args["shape"])
L = simulator_args["L"]
if np.isscalar(L):
L = [L] * int(dim)
Lk = ()
shape = ()
for i, _shape in enumerate(simulator_args["shape"]):
Lk += (_shape / L[i],)
if _shape % 2 == 0:
shape += (_shape + 1,)
else:
shape += (_shape,)
k = simulator_args["k"]
k_shape = k.shape
k = k.flatten()[1:]
tpl = ()
for _d in range(dim):
tpl += (_d,)
V = np.prod(np.array(L))
scale = V**(1. / dim)
fft_norm = np.prod(np.array(Lk))
rng, key = jax.random.split(rng)
mag = jax.random.normal(
key, shape=shape)
pha = 2. * np.pi * jax.random.uniform(
key, shape=shape)
# now make hermitian field (reality condition)
revidx = (slice(None, None, -1),) * dim
mag = (mag + mag[revidx]) / np.sqrt(2)
pha = (pha - pha[revidx]) / 2 + np.pi
dk = mag * (np.cos(pha) + 1j * np.sin(pha))
cutidx = (slice(None, -1),) * dim
dk = dk[cutidx]
powers = np.concatenate(
(np.zeros(1),
np.sqrt(P(k, A=A, B=B)))).reshape(k_shape)
if simulator_args['vol_norm']:
powers /= V
if simulator_args["log_normal"]:
powers = np.real(
np.fft.ifftshift(
np.fft.ifftn(
powers)
* fft_norm) * V)
powers = np.log(1. + powers)
powers = np.abs(np.fft.fftn(powers))
fourier_field = powers * dk
fourier_field = jax.ops.index_update(
fourier_field,
np.zeros(dim, dtype=int),
np.zeros((1,)))
if simulator_args["log_normal"]:
field = np.real(np.fft.ifftn(fourier_field)) * fft_norm * np.sqrt(V)
sg = np.var(field)
field = np.exp(field - sg / 2.) - 1.
else:
field = np.real(np.fft.ifftn(fourier_field) * fft_norm * np.sqrt(V)**2)
if simulator_args["N_scale"]:
field *= scale
if foregrounds is not None:
rng, key = jax.random.split(key)
foreground = foregrounds[
jax.random.randint(
key,
minval=0,
maxval=foregrounds.shape[0],
shape=())]
field = np.expand_dims(field + foreground, (0,))
if not simulator_args["squeeze"]:
field = np.expand_dims(field, (0, 1))
return np.array(field, dtype='float32')
if isinstance(θ, tuple):
A, B = θ
else:
A = np.take(θ, 0, axis=-1)
B = np.take(θ, 1, axis=-1)
if A.shape == B.shape:
if len(A.shape) == 0:
return fn(rng, A, B)
else:
keys = jax.random.split(rng, num=A.shape[0] + 1)
rng = keys[0]
keys = keys[1:]
return jax.vmap(
lambda key, A, B: simulator(
key, (A, B), simulator_args=simulator_args))(
keys, A, B)
else:
if len(A.shape) > 0:
keys = jax.random.split(rng, num=A.shape[0] + 1)
rng = keys[0]
keys = keys[1:]
return jax.vmap(
lambda key, A: simulator(
key, (A, B), simulator_args=simulator_args))(
keys, A)
elif len(B.shape) > 0:
keys = jax.random.split(rng, num=B.shape[0])
return jax.vmap(
lambda key, B: simulator(
key, (A, B), simulator_args=simulator_args))(
keys, B)
We can now set the simulator arguments, i.e. the \(k\)-modes to evaluate, the length of the side of a box, the shape of the box and whether to normalise via the volume and squeeze the output dimensions
simulator_args = dict(
k=k,
L=N,
shape=shape,
vol_norm=True,
N_scale=True,
squeeze=True,
log_normal=False)
Now we can simulate some target data at, for example, \(A^\textrm{target}=0.7\) and \(B^\textrm{target}=0.8\):
θ_target = np.array([0.7, 0.8])
rng, key = jax.random.split(rng)
δ_target = simulator(key, θ_target, simulator_args=simulator_args)
plt.imshow(δ_target)
plt.colorbar();
We can now define our prior distribution (in this case a uniform distribution over \(A\) and \(B\)) with values between 0.1 and 1.25 for both parameters
prior = tfp.distributions.Blockwise(
[tfp.distributions.Uniform(low=low, high=high)
for low, high in zip([0.1, 0.1], [1.25, 1.25])])
prior.low = np.array([0.1, 0.1])
prior.high = np.array([1.25, 1.25])
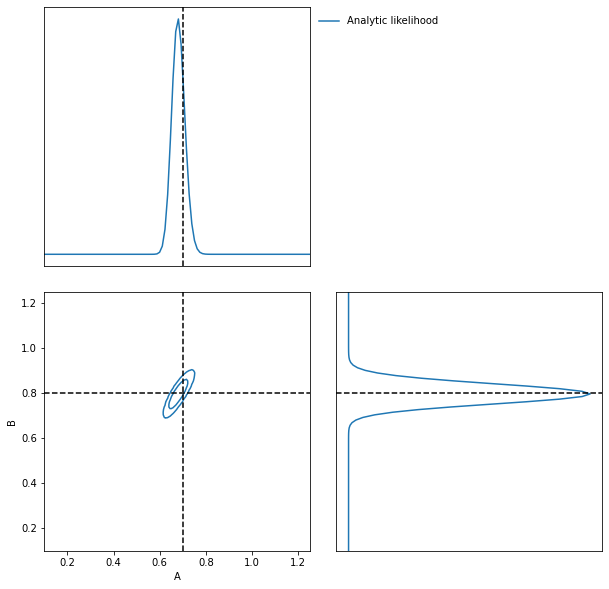
To evaluate the likelihood of this field we can now use (dividing the target \(\delta\) by \(N\) to remove added scaling)
LFI = imnn.lfi.LikelihoodFreeInference(
prior=prior,
gridsize=100)
A, B = np.meshgrid(*LFI.ranges)
LFI.n_targets=1
LFI.put_marginals(
jax.nn.softmax(
np.real(
log_likelihood(
k,
A.ravel(),
B.ravel(),
np.fft.fftn(δ_target / N),
N)
),axis=0
).reshape((100, 100)).T[np.newaxis]);
LFI.marginal_plot(
known=θ_target,
label="Analytic likelihood",
axis_labels=["A", "B"]);
Training an IMNN¶
Now lets train an IMNN to summaries such Gaussian random fields to see how much information we can extract an what sort of constraints we can get. We will use 5000 simulations to estimate the covariance and use all of their derivatives and we’ll summarise the whole random Gaussian field by 2 summaries.
n_s = 5000
n_d = n_s
n_summaries = 2
We’re going to use a fully convolutional inception network built using stax with some custom designed blocks. The inception block itself is implemented as
def InceptBlock(filters, strides, do_5x5=True, do_3x3=True):
"""InceptNet convolutional striding block.
filters: tuple: (f1,f2,f3)
filters1: for conv1x1
filters2: for conv1x1,conv3x3
filters3L for conv1x1,conv5x5"""
filters1, filters2, filters3 = filters
conv1x1 = stax.serial(
stax.Conv(filters1, (1, 1), strides, padding="SAME"))
filters4 = filters2
conv3x3 = stax.serial(
stax.Conv(filters2, (1, 1), strides=None, padding="SAME"),
stax.Conv(filters4, (3, 3), strides, padding="SAME"))
filters5 = filters3
conv5x5 = stax.serial(
stax.Conv(filters3, (1, 1), strides=None, padding="SAME"),
stax.Conv(filters5, (5, 5), strides, padding="SAME"))
maxpool = stax.serial(
stax.MaxPool((3, 3), padding="SAME"),
stax.Conv(filters4, (1, 1), strides, padding="SAME"))
if do_3x3:
if do_5x5:
return stax.serial(
stax.FanOut(4),
stax.parallel(conv1x1, conv3x3, conv5x5, maxpool),
stax.FanInConcat(),
stax.LeakyRelu)
else:
return stax.serial(
stax.FanOut(3),
stax.parallel(conv1x1, conv3x3, maxpool),
stax.FanInConcat(),
stax.LeakyRelu)
else:
return stax.serial(
stax.FanOut(2),
stax.parallel(conv1x1, maxpool),
stax.FanInConcat(),
stax.LeakyRelu)
We’ll also want to make sure that the output of the network is the correct shape, for which we’ll introduce a Reshaping layer
def Reshape(shape):
"""Layer function for a reshape layer."""
init_fun = lambda rng, input_shape: (shape,())
apply_fun = lambda params, inputs, **kwargs: np.reshape(inputs, shape)
return init_fun, apply_fun
Now we can build the network, with kernel sizes of 4 in each direction in each layer
fs = 64
model = stax.serial(
InceptBlock((fs, fs, fs), strides=(4, 4)),
InceptBlock((fs, fs, fs), strides=(4, 4)),
InceptBlock((fs, fs, fs), strides=(4, 4)),
InceptBlock((fs, fs, fs), strides=(2, 2), do_5x5=False, do_3x3=False),
stax.Conv(n_summaries, (1, 1), strides=(1, 1), padding="SAME"),
stax.Flatten,
Reshape((n_summaries,)))
We’ll also grab an adam optimiser from jax.experimental.optimizers
optimiser = optimizers.adam(step_size=1e-3)
Note that due to the form of the network we’ll want to have simulations that have a “channel” dimension, which we can set up by not allowing for squeezing in the simulator.
Initialise IMNN¶
Finally we can initialise the IMNN, letting the IMNN module decide what type of IMNN subclass will be used (we’ll be using SimulatorIMNN)
rng, key = jax.random.split(rng)
IMNN = imnn.IMNN(
n_s=n_s,
n_d=n_d,
n_params=n_params,
n_summaries=n_summaries,
input_shape=(1, 1) + shape,
θ_fid=θ_fid,
model=model,
optimiser=optimiser,
key_or_state=key,
simulator=lambda rng, θ: simulator(
rng, θ, simulator_args={
**simulator_args,
**{"squeeze": False}}))
simulator provided, using SimulatorIMNN
And finally we can fit the IMNN (we’ll use generic regularisation parameters of \(\lambda=10\) and \(\epsilon=0.1\)) and allow early stopping to determine the end of fitting.
%%time
rng, key = jax.random.split(rng)
IMNN.fit(λ=10., ϵ=0.1, rng=key, print_rate=None, min_iterations=500, best=True)
CPU times: user 13min 48s, sys: 6.06 s, total: 13min 54s
Wall time: 14min 2s
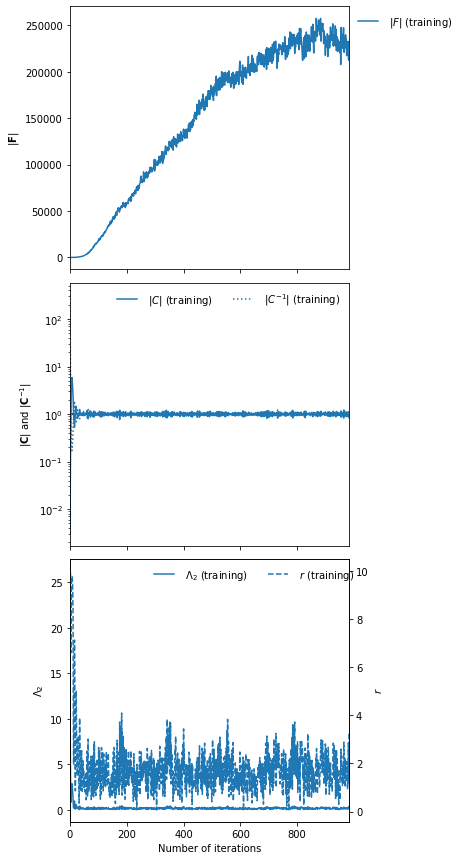
IMNN.plot(expected_detF=np.linalg.det(F));
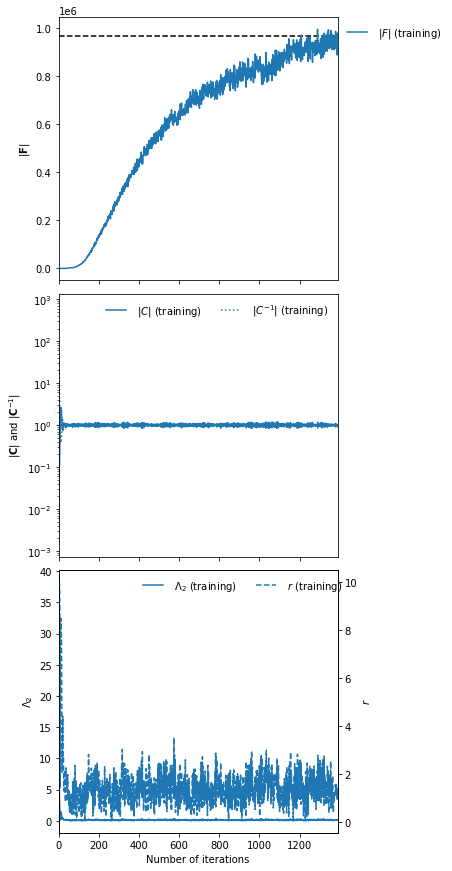
np.linalg.det(IMNN.F) / np.linalg.det(F)
DeviceArray(0.97123594, dtype=float64)
After nearly 1400 iterations of fitting we obtain (at the last iteration) over 97% of the information. The maximum value of the log determinant of the Fisher information obtained by the IMNN is slightly over the analytic value because it is estimated over a limited set which might accidentally have more information due to the stochastic realisation. For this reason we choose the Fisher information at the last iterations rather than the best fit.
Inference¶
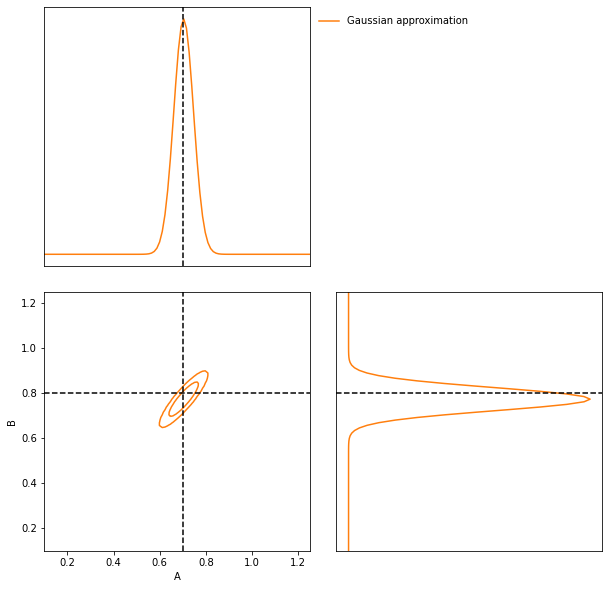
We can now attempt to do inference of some target data using the IMNN. The first thing we should do is make a Gaussian approximation using a parameter estimate from the IMNN and the Fisher information reached at the end of fitting. Note that since the fiducial parameter values are far from the “target” that this estimate of the Fisher information as the covariance will likely be misleading.
GA = imnn.lfi.GaussianApproximation(
parameter_estimates=IMNN.get_estimate(np.expand_dims(δ_target, (0, 1, 2))),
invF=np.expand_dims(np.linalg.inv(IMNN.F), 0),
prior=prior,
gridsize=100)
GA.marginal_plot(
known=θ_target,
label="Gaussian approximation",
axis_labels=["A", "B"],
colours="C1");
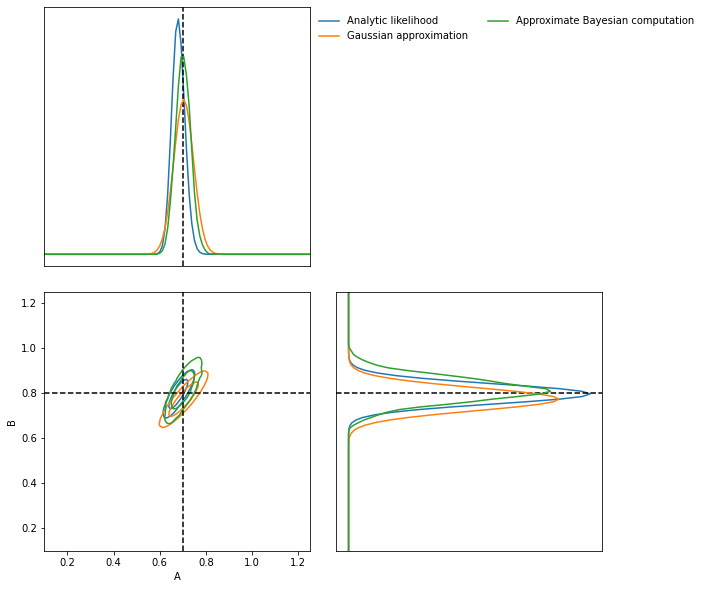
And finally we can do an approximate Bayesian computation
ABC = imnn.lfi.ApproximateBayesianComputation(
target_data=np.expand_dims(δ_target, (0, 1, 2)),
prior=prior,
simulator=lambda rng, θ: simulator(rng, θ, simulator_args={**simulator_args, **{'squeeze':False}}),
compressor=IMNN.get_estimate,
gridsize=100,
F=np.expand_dims(IMNN.F, 0))
rng, key = jax.random.split(rng)
ABC(ϵ=1., rng=key, n_samples=10000, min_accepted=1000,
smoothing=1, max_iterations=1000);
[1010] accepted in last 43 iterations (430000 simulations done).
ax = LFI.marginal_plot(
known=θ_target,
label="Analytic likelihood",
axis_labels=["A", "B"])
GA.marginal_plot(
ax=ax,
label="Gaussian approximation",
colours="C1",
axis_labels=["A", "B"])
ABC.marginal_plot(
ax=ax,
label="Approximate Bayesian computation",
colours="C2");
plt.show()
Cosmological parameter inference of log normal fields¶
As a more realistic example of cosmological parameter inference from dark matter fields, albeit it one where we do not (yet) know the amount of information in the field, we can create a log normal field from a power spectrum generated with cosmological parameters.
For example lets say that our fiducial cosmology has
\(\Omega_c=0.40\) and \(\sigma_8=0.75\), using jax-cosmo we
can set
cosmo_params = jc.Planck15(Omega_c=0.40, sigma8=0.75)
θ_fid = np.array(
[cosmo_params.Omega_c,
cosmo_params.sigma8],
dtype=np.float32)
Our new \(P(k)\) is simply the linear matter power spectrum defined as
def P(k, A=0.40, B=0.75):
cosmo_params = jc.Planck15(Omega_c=A, sigma8=B)
return jc.power.linear_matter_power(cosmo_params, k)
simulator_args = dict(
k=k,
L=250,
shape=shape,
vol_norm=True,
N_scale=False,
squeeze=True,
log_normal=True)
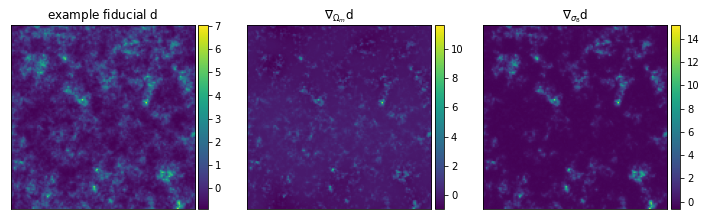
Since our lognormal field simulator and power spectra code are
differentiable via Jax, we can simulate a differentiable universe.
We’ll pull out a nice function to visualize fiducial example data and
its derivatives with respect to the cosmological parameters.
from imnn.utils import value_and_jacrev, value_and_jacfwd
simulation, simulation_gradient = value_and_jacfwd(
simulator, argnums=1)(
rng, θ_fid, simulator_args=simulator_args)
from mpl_toolkits.axes_grid1 import make_axes_locatable
fig,ax = plt.subplots(nrows=1, ncols=3, figsize=(12,15))
im1 = ax[0].imshow(np.squeeze(simulation),
extent=(0, 1, 0, 1))
ax[0].title.set_text(r'example fiducial $\rm d$')
divider = make_axes_locatable(ax[0])
cax = divider.append_axes('right', size='5%', pad=0.05)
fig.colorbar(im1, cax=cax, orientation='vertical')
im1 = ax[1].imshow(np.squeeze(simulation_gradient).T[0].T,
extent=(0, 1, 0, 1))
ax[1].title.set_text(r'$\nabla_{\Omega_m} \rm d$')
divider = make_axes_locatable(ax[1])
cax = divider.append_axes('right', size='5%', pad=0.05)
fig.colorbar(im1, cax=cax, orientation='vertical')
im1 = ax[2].imshow(np.squeeze(simulation_gradient).T[1].T,
extent=(0, 1, 0, 1))
ax[2].title.set_text(r'$\nabla_{\sigma_8} \rm d$')
divider = make_axes_locatable(ax[2])
cax = divider.append_axes('right', size='5%', pad=0.05)
fig.colorbar(im1, cax=cax, orientation='vertical')
for a in ax:
a.set_xticks([])
a.set_yticks([])
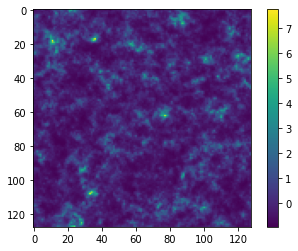
We’ll now make the target universe that we observe generated with realistic parameters - \(\Omega_c=0.35\) and \(\sigma_8=0.8\)
θ_target = np.array([0.35, 0.8])
rng, key = jax.random.split(rng)
δ_target = simulator(
key, θ_target, simulator_args=simulator_args,
)
plt.imshow(δ_target)
plt.colorbar();
We can now train an IMNN as before
rng, key = jax.random.split(rng)
IMNN = imnn.IMNN(
n_s=n_s,
n_d=n_d,
n_params=n_params,
n_summaries=n_summaries,
input_shape=(1, 1) + shape,
θ_fid=θ_fid,
model=model,
optimiser=optimiser,
key_or_state=key,
simulator=lambda rng, θ: simulator(
rng, θ,
simulator_args={**simulator_args,
**{"squeeze": False}}))
simulator provided, using SimulatorIMNN
%%time
rng, key = jax.random.split(rng)
IMNN.fit(λ=10., ϵ=0.1, rng=key, print_rate=None, min_iterations=500, best=False)
CPU times: user 19min 21s, sys: 3min 38s, total: 23min
Wall time: 23min 6s
IMNN.plot(expected_detF=None);
And finally we can do our inference. We’ll first set the prior distribution
prior = tfp.distributions.Blockwise(
[tfp.distributions.Uniform(low=low, high=high)
for low, high in zip([0., 0.], [1.5, 1.5])])
prior.low = np.array([0., 0.])
prior.high = np.array([1.5, 1.5])
And make the Gaussian approximation using the Fisher information
GA = imnn.lfi.GaussianApproximation(
parameter_estimates=IMNN.get_estimate(np.expand_dims(δ_target, (0, 1, 2))),
invF=np.expand_dims(np.linalg.inv(IMNN.F), 0),
prior=prior,
gridsize=100)
And then run the ABC
ABC = imnn.lfi.ApproximateBayesianComputation(
target_data=np.expand_dims(δ_target, (0, 1, 2)),
prior=prior,
simulator=lambda rng, θ: simulator(rng, θ, simulator_args={**simulator_args, **{'squeeze':False}}),
compressor=IMNN.get_estimate,
gridsize=100,
F=np.expand_dims(IMNN.F, 0))
rng, key = jax.random.split(rng)
ABC(ϵ=0.1, rng=key, n_samples=10000, min_accepted=1000,
smoothing=1., max_iterations=5000);
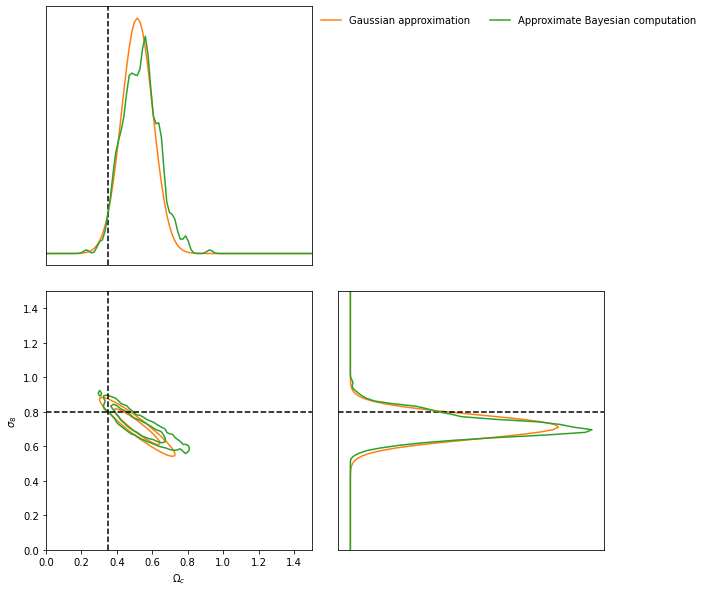
And then we can plot the constraints obtained using the IMNN and LFI
ax = GA.marginal_plot(
known=θ_target,
label="Gaussian approximation",
axis_labels=[r"$\Omega_c$", r"$\sigma_8$"],
colours="C1")
ABC.marginal_plot(
ax=ax,
label="Approximate Bayesian computation",
colours="C2");