IMNN vs regression networks¶
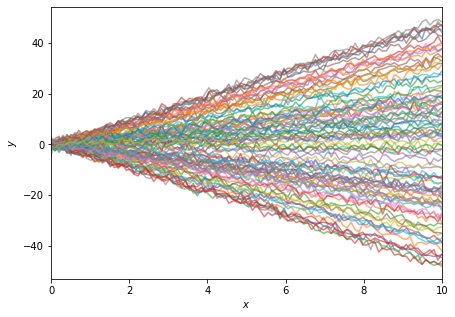
In this example we’ll compare using an IMNN and training a neural network to do regression. Specifically we’ll get an IMNN to summarise the slopes of noisy lines, and regress a network using mean squared error to the values of these slopes. The model is
where \(\epsilon\leftarrow N(0, 1)\) and \(x\in[0,10]\). We’re not particularly aiming to show that the IMNN is better, although in principle, the direct targeting of the effects of the slope rather than just seeing many realisations of slopes should allow the IMNN to extract more information, at least at the fiducial parameter values.
import jax
import jax.numpy as np
import imnn
import imnn.lfi
import tensorflow_probability
import matplotlib.pyplot as plt
import tqdm.auto as tqdm
from functools import partial
from jax.experimental import stax, optimizers
tfp = tensorflow_probability.substrates.jax
rng = jax.random.PRNGKey(0)
We’ll first make our simulator
input_shape = (100,)
n_params = 1
n_summaries = n_params
x = np.linspace(0, 10, input_shape[0]).astype(np.float32)
def simulator(key, m, squeeze=True):
y = (m * x[np.newaxis, :]
+ jax.random.normal(key, shape=(m.shape[0],) + x.shape))
if squeeze:
y = np.squeeze(y)
return y
And we’ll set up the prior distribution for the possible values of \(m\) (just a uniform between \(-5<m<5\))
prior = tfp.distributions.Independent(
tfp.distributions.Uniform(low=[-5.], high=[5.]),
reinterpreted_batch_ndims=1)
prior.low = np.array([-5.])
prior.high = np.array([5.])
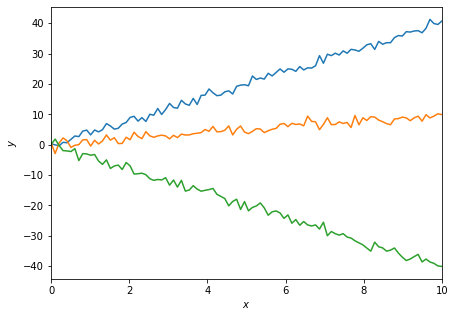
For example, some realisations of this data looks like
fig = plt.figure(figsize=(7, 5))
plt.xlabel("$x$")
plt.xlim([0, 10])
plt.ylabel("$y$");
plt.tick_params(axis="both")
rng, simulator_key, parameter_key = jax.random.split(rng, num=3)
simulator_keys = np.array(jax.random.split(simulator_key, num=100))
parameter_keys = np.array(jax.random.split(parameter_key, num=100))
plt.plot(
x,
jax.vmap(simulator)(
simulator_keys,
jax.vmap(
lambda key:prior.sample(seed=key))(
parameter_keys)).T,
alpha=0.6);
We’re going to use a model built with stax, and use exactly the same model (with the same initialisation) for both the IMNN and the mse regression network
model = stax.serial(
stax.Dense(128),
stax.LeakyRelu,
stax.Dense(128),
stax.LeakyRelu,
stax.Dense(128),
stax.LeakyRelu,
stax.Dense(n_summaries),
)
optimiser = optimizers.adam(step_size=1e-3)
The IMNN does the initialisation by just providing a key on the class
instantiation, and we’ll manually initialise the mse network in the same
way. To make a better comparison we’re going to ensure that the same
number of simulations are seen by both networks. Note that for the IMNN,
these will all be simulations at the same parameter value (with their
gradients calculated automatically) whilst with the regression network,
the simulations will be made with slopes drawn randomly from the prior.
To do this we’re going to set the number of simulations for the IMNN to
be n_s=1000 and for no real reason, we’ll choose the fiducial
parameter value to be \(m^\textrm{fid}=4\).
n_s = 1000
n_d = n_s
m_fid = np.array([4.])
Now to initialise the networks we’ll get a random number generator
rng, key = jax.random.split(rng)
And pass the simulator to the IMNN decision function
IMNN = imnn.IMNN(
n_s=n_s, n_d=n_d, n_params=n_params, n_summaries=n_summaries,
input_shape=input_shape, θ_fid=m_fid, model=model,
optimiser=optimiser, key_or_state=key,
simulator=lambda key, m: simulator(key, m))
simulator provided, using SimulatorIMNN
We’ll then initialise the model for the regression network with the same key.
mse_output, mse_w = model[0](key, input_shape)
mse_state = optimiser[0](mse_w)
To see that they are the same we can pass the same piece of data through the networks and look at the value of the result
rng, key = jax.random.split(rng)
print("IMNN output = " +
f"{IMNN.model(IMNN.w, simulator(key, np.array([1.])))}")
print("regression network output = " +
f"{model[1](mse_w, simulator(key, np.array([1.])))}")
IMNN output = [-1.4816203]
regression network output = [-1.4816203]
We’ll train the IMNN first so we know how many epochs to run the training of the regression network for, since the IMNN will stop according to early stopping on the amount of information extracted
rng, key = jax.random.split(rng)
IMNN.fit(λ=10., ϵ=0.1, rng=key, print_rate=1, best=False)
IMNN.plot();
0it [00:00, ?it/s]
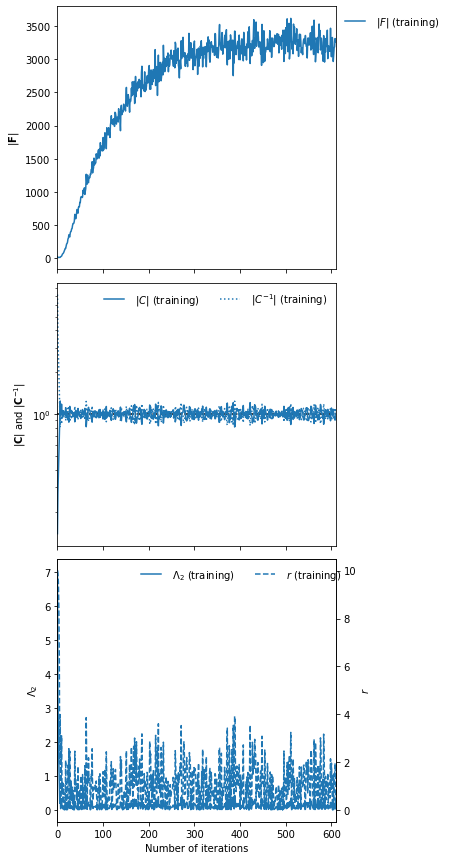
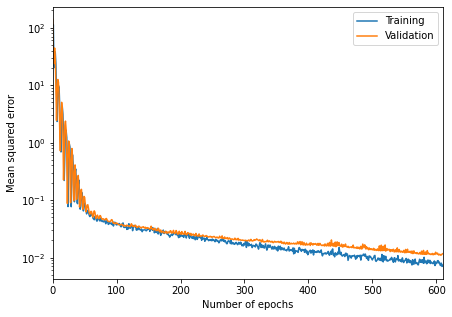
It took 611 iterations of training until early stopping finished the fitting of the IMNN, so we will run the regression for the same amount of time, training it with 611000 different simulations. We’ll actually run the simulations on the fly, and we’ll make fixed validation set to compare.
rng, key = jax.random.split(rng)
validation_m = prior.sample(100, seed=key)
rng, *keys = jax.random.split(rng, num=101)
validation_y = jax.vmap(simulator)(
np.array(keys), validation_m)
The loss function to optimise will take a random number and the current
network parameters, and generate n_s \(m\) values and generate
simulations at each of these values and then calculate the mean squared
difference between the output of the network with the simulation as an
input and the value of \(m\) just drawn. We’ll also get the value
and the gradient of this function.
@jax.jit
def mse(w, m, y):
return np.mean((model[1](w, y) - m)**2.)
@partial(jax.value_and_grad, argnums=1)
@jax.jit
def g_mse(rng, w):
m_key, y_key = jax.random.split(rng)
m = prior.sample(n_s, seed=m_key)
y_keys = np.array(jax.random.split(y_key, num=n_s))
y = jax.vmap(simulator)(y_keys, m)
return mse(w, m, y)
Now we’ll run the training
mse_loss = np.zeros((611, 2))
bar = tqdm.trange(611)
for i in bar:
w = optimiser[2](mse_state)
rng, key = jax.random.split(rng)
l, g = g_mse(key, w)
mse_state = optimiser[1](i, g, mse_state)
w = optimiser[2](mse_state)
mse_loss = jax.ops.index_update(
mse_loss,
jax.ops.index[i],
[l, mse(w, validation_m, validation_y)])
bar.set_postfix(loss=mse_loss[i])
0%| | 0/611 [00:00<?, ?it/s]
fig = plt.figure(figsize=(7, 5))
plt.semilogy(mse_loss)
plt.xlabel("Number of epochs")
plt.ylabel("Mean squared error")
plt.xlim([0, 611])
plt.legend(["Training", "Validation"]);
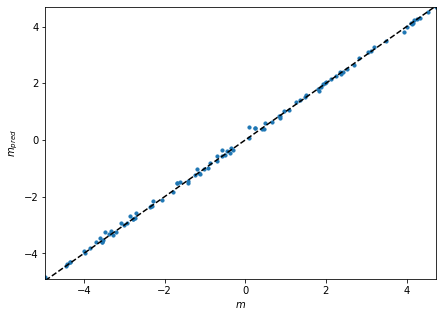
We can also check how well the regression network works with a test set
rng, key = jax.random.split(rng)
test_m = prior.sample(100, seed=key)
rng, *keys = jax.random.split(rng, num=101)
test_y = jax.vmap(simulator)(
np.array(keys), test_m)
mse_m = model[1](w, test_y)
fig = plt.figure(figsize=(7, 5))
plt.scatter(test_m, mse_m, s=10)
plt.plot(
[test_m.min(), test_m.max()],
[test_m.min(), test_m.max()],
linestyle="dashed",
color="black")
plt.xlim([test_m.min(), test_m.max()])
plt.ylim([mse_m.min(), mse_m.max()])
plt.xlabel("$m$")
plt.ylabel("$m_{pred}$");
Inference¶
Now we can use both of these networks to do some inference. We’re going to try and infer the value of the slopes for three lines, one generated at a value at the fiducial, one not far from the fiducial and one very far, i.e. \(m^\textrm{target}=\{4, 1, -4\}\).
rng, *keys = jax.random.split(rng, num=4)
target_m = np.expand_dims(np.array([4., 1., -4.]), 1)
target_data = jax.vmap(simulator)(np.array(keys), target_m)
fig = plt.figure(figsize=(7, 5))
plt.xlabel("$x$")
plt.xlim([0, 10])
plt.ylabel("$y$");
plt.tick_params(axis="both")
plt.plot(x, target_data.T);
If we just look at the estimated target values we can see that both networks do well close to the fiducial parameter values, but the IMNN does badly far from the fiducial
print(f"IMNN parameter estimates = {IMNN.get_estimate(target_data)}")
print(f"regression parameter estimates = {model[1](w, target_data)}")
IMNN parameter estimates = [[ 4.0084834 ]
[ 0.98241055]
[-1.40224 ]]
regression parameter estimates = [[ 3.9941278 ]
[ 0.83408386]
[-4.071932 ]]
However, if we do the LFI, i.e. just run an ABC to get 1000 samples within an epsilon ball of \(\epsilon=0.1\) we can compare the approximate posteriors. Note this epsilon doesn’t mean the same thing for the two different estimators so choosing the same value doesn’t really indicate how “marginal” the slice through the joint distribution of summaries and parameters is - for this reason we’ll show the whole joint space.
ABC = imnn.lfi.ApproximateBayesianComputation(
target_data=target_data,
prior=prior,
simulator=partial(simulator, squeeze=False),
compressor=IMNN.get_estimate,
F=np.stack([IMNN.F for i in range(3)], axis=0))
mse_ABC = imnn.lfi.ApproximateBayesianComputation(
target_data=target_data,
prior=prior,
simulator=partial(simulator, squeeze=False),
compressor=lambda y: model[1](w, y))
rng, key = jax.random.split(rng)
ABC(rng=key, ϵ=0.1, n_samples=100000, min_accepted=1000, max_iterations=1000);
mse_ABC(rng=key, ϵ=0.1, n_samples=100000, min_accepted=1000, max_iterations=1000);
[1004 1043 2819] accepted in last 28 iterations (2800000 simulations done).
[1956 2003 2034] accepted in last 1 iterations (100000 simulations done).
And now we’ll plot the joint space for all of the targets. The top subplot shows the a histogram of the parameter values used to generate simulations whose summaries are closest to the summaries of the target data, i.e. the approximate posterior. The bottom scatter plot shows the joint space of parameters and summary values (parameter estimates) and the bottom right subplot shows the likelihood of the summary values, i.e. the probability of values of the summaries at a given value of the target parameters.
fig, ax = plt.subplots(2, 2, figsize=(10, 10))
plt.subplots_adjust(wspace=0, hspace=0)
for i in range(3):
ax[0, 0].axvline(
target_m[i],
color="black",
linestyle="dashed",
zorder=-1)
ax[0, 0].hist(
mse_ABC.parameters.accepted[i].T,
range=[-5., 5.],
bins=200,
histtype="step",
density=True)
ax[0, 0].hist(
ABC.parameters.accepted[i].T,
range=[-5., 5.],
bins=200,
histtype="step",
density=True)
ax[1, 0].axhline(
mse_ABC.target_summaries[i],
linestyle="dashed",
color=f"C{i * 2}",
zorder=-1)
ax[1, 0].axhline(
ABC.target_summaries[i],
linestyle="dashed",
color=f"C{i * 2 + 1}",
zorder=-1)
ax[1, 0].axvline(
target_m[i],
color="black",
linestyle="dashed",
zorder=-1)
ax[1, 0].scatter(
mse_ABC.parameters.accepted[i],
mse_ABC.summaries.accepted[i],
s=5,
label=f"Regression ($m = {target_m[i][0]}$)")
ax[1, 0].scatter(
ABC.parameters.accepted[i],
ABC.summaries.accepted[i],
s=5,
label=f"IMNN ($m = {target_m[i][0]}$)")
ax[1, 1].axhline(
mse_ABC.target_summaries[i],
linestyle="dashed",
color=f"C{i * 2}",
zorder=-1)
ax[1, 1].axhline(
ABC.target_summaries[i],
linestyle="dashed",
color=f"C{i * 2 + 1}",
zorder=-1)
ax[1, 1].hist(
mse_ABC.summaries.accepted[i].T,
range=[-5., 5.],
bins=100,
histtype="step",
density=True,
orientation="horizontal")
ax[1, 1].hist(
ABC.summaries.accepted[i].T,
range=[-5., 5.],
bins=100,
histtype="step",
density=True,
orientation="horizontal")
ax[1, 0].legend(loc=4)
ax[0, 1].axis("off")
ax[0, 0].set(
xticks=[],
yticks=[],
xlim=(-5, 5),
ylabel="$P(m|y)$")
ax[1, 0].set(
xlabel="$m$",
ylabel="$m_{pred}$",
xlim=(-5, 5),
ylim=(-5, 5))
ax[1, 1].set(
xticks=[],
yticks=[],
ylim=(-5, 5),
xlabel="$L(m_{pred}|m)$");
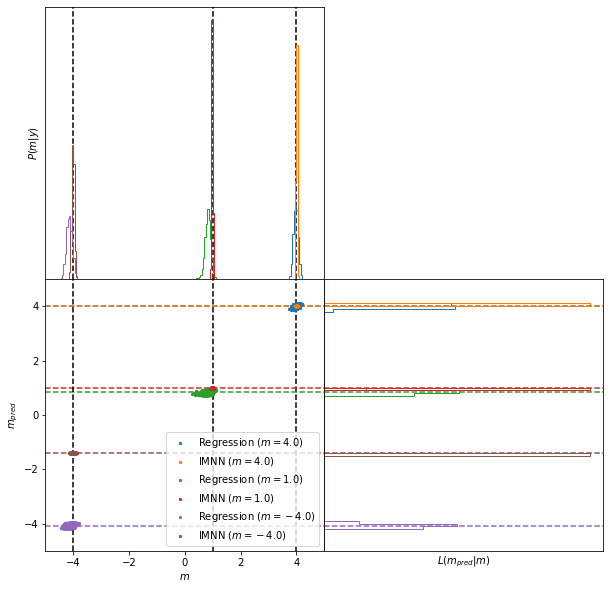
Here we can see that the IMNN has consistently tighter posteriors (top subplot) than the regression network, and seemingly less bias (looking at the green constraints from the regression network and the red constraints from the INMN). Here, clearly the size of the epsilon is apparently accepting summaries from further away for the regression network, but even just looking (again the green) scatter points, the bulk of the scatter points at the horizontal green line is further from the black dashed vertical line showing that more samples would be needed inside a smaller epsilon ball which would likely lead to a wide posterior anyway.
Cool hey!